select experiences
Open Source Developer
Refactored Fineract’s command processing to use typed DTOs instead of JSON, improving type safety and maintainability. Extending the framework to add auditing, idempotency, and retry logic while keeping APIs backward compatible.
Google Summer of Code 2025 Participant
Developed an end-to-end Credit Bureau Integration microservice for Mifos X, automating the loan check process and streamlining the loan processing workflow.
Software Engineer
Contributed to the National Police Data Coalition through Develop for Good’s 2023 cohort. Developed admin tool frontends and connected them to a Python API for seamless data interaction.
undergrad research
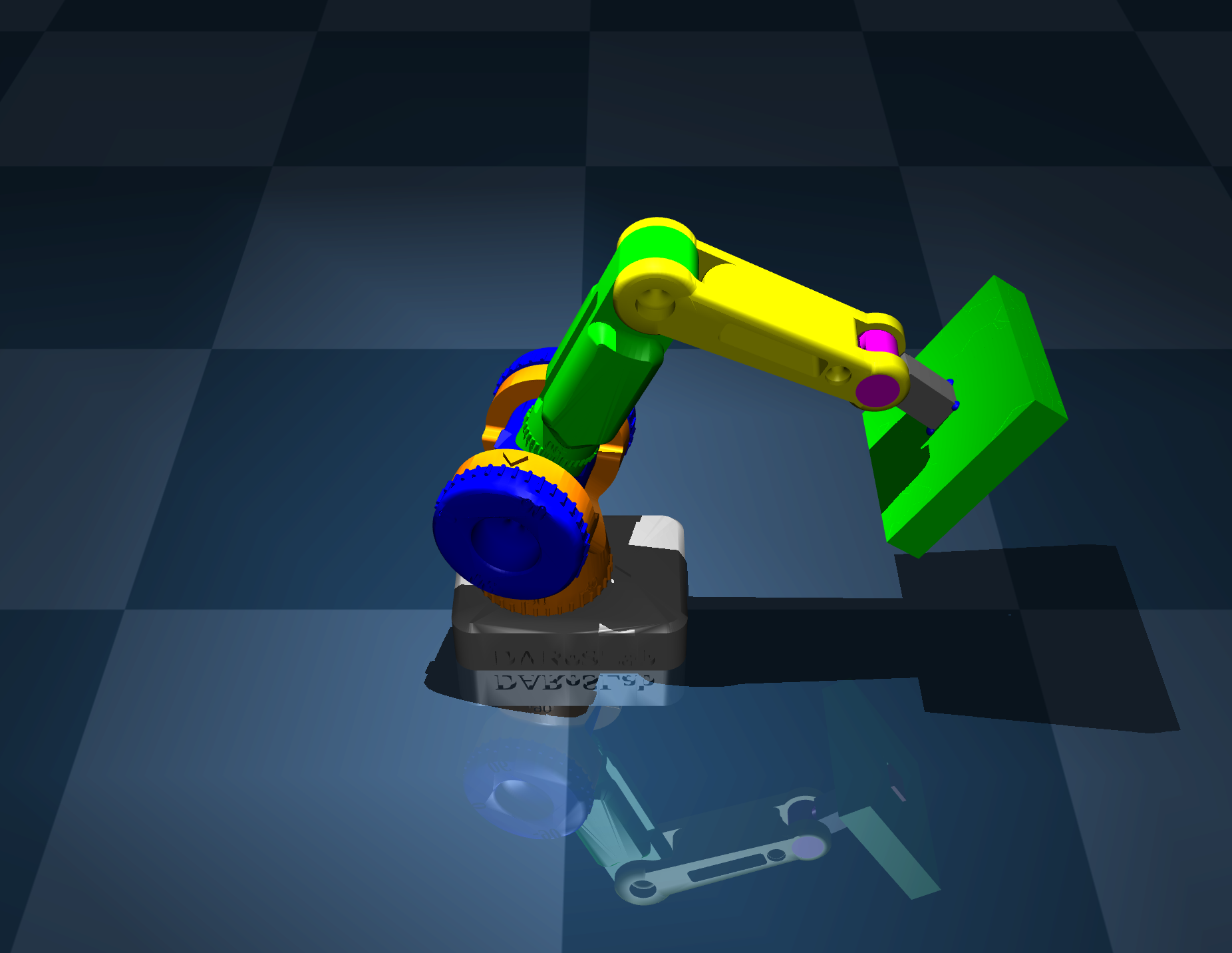
Robotics, Simulation, and Education (Rose) Lab
Developed an end-to-end motion planning pipeline for Duckietown robots by integrating OMPL with SE(2), including A waypoint generation and PRM-based continuous planning. Built command translation interfaces, automated environment setup with tests, and presented results at the Mount Holyoke College Summer Research Symposium (2024).
Intelligent Medical Robotics (iMero) Lab
Contributed to an NSF-funded project on vision-based force estimation for robot-assisted minimally invasive surgery. Built force-sensor hardware, created a Python/OpenCV preprocessing pipeline for 57,600 images, and trained a CNN-based multimodal model in TensorFlow; presented results through the Mount Holyoke LEAP program (2023).